Run experiments at NSLS-II¶
Here, we demonstrate the example code to run the fly scan and grid scan experiment at the NSLS-II.
Simulated motors and detectors¶
To demonstrate the example, we set up some simulated motors and detectors for better description. During the beamtime, these objects will be connected to the real devices.
import crystalmapping.sim as sim
# An area detector behind the sample
detector = sim.FakeAreaDetector(name="image")
# A motor to control the vertical position of the sample stage
motor_y = sim.SynAxis(name="y")
# A motor to control the horizontal position of the sample stage
motor_x = sim.SynAxis(name="x")
# A motor to control the orientaion of the sample stage
motor_phi = sim.SynAxis(name="phi")
# A fast shutter
shutter = sim.SynSignal(name="shutter")
Fly scan¶
A fly scan is to move to a position in the motor positions space, start the movement of a fly motor and take light images for specific times during the non-stopping movement and then move to the next point and repeat.
Please the document of the function to know the syntax.
import crystalmapping.plans as plans
help(plans.fly_scan_nd)
Help on function fly_scan_nd in module crystalmapping.plans:
fly_scan_nd(detectors: list, *args, move_velocity: float, time_per_point: float, time_per_frame: float, shutter: object, shutter_open: Any, shutter_close: Any, shutter_wait_open: float = 0.0, shutter_wait_close: float = 0.0, take_dark: bool = True, md: dict = None, backoff: float = 0.0, snake: bool = False) -> <class 'Generic'>
Move on a grid and do a fly scan at each point in the grid.
For example, `fly_scan_nd([detector], motor_y, 0, 10, 11, motor_x, 0, 20, 21, motor_fly, 0, 5, 6, time_per_point=10, time_per_frame=1, shutter=shutter, shutter_open=1, shutter_close=0, shutter_wait_open=2, shutter_wait_close=5, move_velocity=5, take_dark=True, md={"task": "fly scan sample 1", backoff=0.5, snake=False})` means that
set detector so that it will collect one image for 10 s
one image contains 10 frames and each frame for 1 s
for y in 0, 1, 2, ..., 10:
for x in 0, 1, 2, ..., 20:
move to (x, y)
wait 5 s
collect dark image during the movement
open shutter
wait 2 s
fly scan the motor_fly from -0.5 to 5.5
collect 6 images during the fly
close shutter
Parameters
----------
detectors : list
A list of detectors. The first one must be an area detector. The list shouldn't include the motors in the `args`.
*args :
patterned like (``motor1, start1, stop1, num1,``
``motor2, start2, stop2, num2,``
``motor3, start3, stop3, num3,`` ...
``motorN, startN, stopN, numN``)
The first motor is the "slowest", the outer loop. The last motor
is the "fly" motor, the non-stoping scan along an axis. For all motors
except the first motor, there is a "snake" argument: a boolean
indicating whether to following snake-like, winding trajectory or a
simple left-to-right trajectory.
move_velocity : float
The speed for the motors to move to the next grid point.
time_per_point : float
The time to collect one image at one point.
time_per_frame : float
The time to collect one frame in a image. One image contains serveral frames.
shutter : object
The fast shutter.
shutter_open : typing.Any
The value of the shutter in open state.
shutter_close : typing.Any
The value of the shutter in close state.
shutter_wait_open : float, optional
The time between the shutter open and the start of the light image collection, by default 0.
shutter_wait_close : float, optional
The time between the shutter close and the start of the dark image collection, by default 0.
take_dark : bool, optional
If true, take a dark image at the end of the fly scan, by default True
md : dict, optional
The dictionary of the metadata to added into the plan, by default None
backoff : float, optional
If non-zero, fly scan from start - backoff to end + backoff, by default 0.
snake : bool, optional
If true, snake the axis of the fly scan, by default False
Returns
-------
typing.Generic
The generator of the plan.
Yields
-------
Iterator[typing.Generic]
The messages of the plan.
Raises
------
TomoPlanError
Empty detector list.
TomoPlanError
Not enough motors.
TomoPlanError
Wrong motor positions format.
Fly scan in rows¶
Here is an example of fly scan in rows.
plan = plans.fly_scan_nd(
[detector],
motor_y, 0.0, 20.0, 3,
motor_x, -5, 25, 3,
move_velocity=10.0,
time_per_point=1.0,
time_per_frame=1.0,
shutter=shutter,
shutter_open="open",
shutter_close="close",
shutter_wait_open=1.0,
shutter_wait_close=5.0,
take_dark=True,
md={"sample": "A rod"}
)
The pseudo-code of it can be expressed as below.
for y in 0, 10, 20:
move to y
close shutter
wait 5 s
take dark during the movement
open shutter
fly scan x from -5 to 25, collect 3 images
Here, we print out the details in this plan. Please pay attention to the manner of the shutter in the run to better understand the logic of the dark frame.
import bluesky.simulators as bss
import itertools as it
copys = it.tee(plan, 2)
bss.summarize_plan(copys[0])
image_cam_acquire_time -> 1.0
image_images_per_set -> 1
=================================== Open Run ===================================
*** all positions for x_velocity are relative to current position ***
x_velocity -> 10.0
y -> 0.0
x -> -5.0
Read ['image']
x_velocity -> 10.0
shutter -> open
x -> 25.0
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
shutter -> close
x_velocity -> 10.0
y -> 10.0
x -> -5.0
Read ['image']
x_velocity -> 10.0
shutter -> open
x -> 25.0
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
shutter -> close
x_velocity -> 10.0
y -> 20.0
x -> -5.0
Read ['image']
x_velocity -> 10.0
shutter -> open
x -> 25.0
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
start_x -> None
stop_x -> None
Read ['image', 'start_x', 'stop_x', 'x_velocity']
shutter -> close
================================== Close Run ===================================
x_velocity -> 0
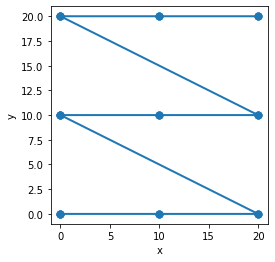
Here, we plot the trajectory of the stage. Be mindful that the beam moves in the opposite direction in the sample frame. A lager y means the beam aiming at a lower part of the sample.
import matplotlib.pyplot as plt
bss.plot_raster_path(copys[1], "x", "y")
plt.show()
Fly scan in rocking curves on a grid¶
A more complicated example is to move the sample in a grid and fly in the rotation.
plan = plans.fly_scan_nd(
[detector],
motor_y, 0.0, 20.0, 3,
motor_x, 0.0, 20.0, 3,
motor_phi, -1.5, 1.5, 3,
move_velocity=10.0,
time_per_point=1.0,
time_per_frame=1.0,
shutter=shutter,
shutter_open="open",
shutter_close="close",
shutter_wait_open=1.0,
shutter_wait_close=5.0,
take_dark=True,
md={"sample": "A rod"}
)
The pseudo-code of it is shown below.
for y in 0, 10, 20:
for x in 0, 10, 20:
move to (x, y)
close shutter
wait 5 s
take dark during the movement
open shutter
fly scan phi from -1.5 to 1.5, collect 3 images
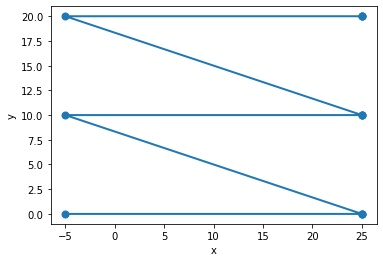
We plot the trajectory in (x, y) plane. At each point, there is a fly scan in the phi axis.
bss.plot_raster_path(plan, "x", "y")
plt.show()
Grid scan¶
A grid scan is to move to a point in the motor positions space, stay there, collect one image at that point and then move to the next point and repeat.
Please read the document below about the syntax of the function.
help(plans.grid_scan_nd)
Help on function grid_scan_nd in module crystalmapping.plans:
grid_scan_nd(detectors: list, *args, snake: Union[list, bool] = None, time_per_point: float, time_per_frame: float, shutter: object, shutter_open: Any, shutter_close: Any, shutter_wait_open: float = 0.0, shutter_wait_close: float = 0.0, take_dark: bool = True, md=None) -> <class 'Generic'>
Scan over a mesh; each motor is on an independent trajectory.
Parameters
----------
detectors : list
A list of 'readable' objects
*args :
patterned like (``motor1, start1, stop1, num1,``
``motor2, start2, stop2, num2,``
``motor3, start3, stop3, num3,`` ...
``motorN, startN, stopN, numN``)
The first motor is the "slowest", the outer loop. The last motor
is the "fly" motor, the non-stoping scan along an axis. For all motors
except the first motor, there is a "snake" argument: a boolean
indicating whether to following snake-like, winding trajectory or a
simple left-to-right trajectory.
snake : bool, optional
If true, snake the axis of the fly scan, by default None
time_per_point : float
The time to collect one image at one point.
time_per_frame : float
The time to collect one frame in a image. One image contains serveral frames.
time_per_point : float
The time to collect one image at one point.
time_per_frame : float
The time to collect one frame in a image. One image contains serveral frames.
shutter : object
The fast shutter.
shutter_open : typing.Any
The value of the shutter in open state.
shutter_close : typing.Any
The value of the shutter in close state.
shutter_wait_open : float, optional
The time between the shutter open and the start of the light image collection, by default 0.
shutter_wait_close : float, optional
The time between the shutter close and the start of the dark image collection, by default 0.
take_dark : bool, optional
If true, take a dark image at the end of the fly scan, by default True
md : [type], optional
The dictionary of the metadata to added into the plan, by default None, by default None
Returns
-------
typing.Generic
The generator of the plan.
Yields
-------
Iterator[typing.Generic]
The messages of the plan.
Raises
------
TomoPlanError
Empty detector list.
TomoPlanError
Not enough motors.
TomoPlanError
Wrong motor positions format.
Grid scan in (x, y) plane¶
Below is an example to do grid scan in rows.
plan = plans.grid_scan_nd(
[detector],
motor_y, 0.0, 20.0, 3,
motor_x, 0.0, 20.0, 3,
time_per_point=1.0,
time_per_frame=1.0,
shutter=shutter,
shutter_open="open",
shutter_close="close",
shutter_wait_open=1.0,
shutter_wait_close=5.0,
take_dark=True,
md={"sample": "A rod"}
)
The pseudo-code of it can be expressed as below.
for y in 0, 10, 20:
for x in 0, 10, 20:
move to (x, y)
if y moves in this step:
close shutter
wait 5 s
take dark during the movement
open shutter
collect 1 image
We print out the details of the plans.
copys = it.tee(plan, 2)
bss.summarize_plan(copys[0])
image_cam_acquire_time -> 1.0
image_images_per_set -> 1
shutter -> open
=================================== Open Run ===================================
y -> 0.0
x -> 0.0
shutter -> close
Read ['image']
shutter -> open
Read ['image']
y -> 0.0
x -> 10.0
Read ['image']
y -> 0.0
x -> 20.0
Read ['image']
y -> 10.0
x -> 0.0
shutter -> close
Read ['image']
shutter -> open
Read ['image']
y -> 10.0
x -> 10.0
Read ['image']
y -> 10.0
x -> 20.0
Read ['image']
y -> 20.0
x -> 0.0
shutter -> close
Read ['image']
shutter -> open
Read ['image']
y -> 20.0
x -> 10.0
Read ['image']
y -> 20.0
x -> 20.0
Read ['image']
================================== Close Run ===================================
shutter -> close
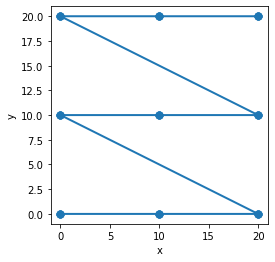
We plot the trajectory of the stage.
bss.plot_raster_path(copys[1], "x", "y")
plt.show()
Grid scan in (phi, x, y) space¶
We can use arbitrary number of the motors in a grid scan. Here, we show an example to do a scan in a three dimensional space.
plan = plans.grid_scan_nd(
[detector],
motor_y, 0.0, 20.0, 3,
motor_x, 0.0, 20.0, 3,
motor_phi, -1, 1, 3,
time_per_point=1.0,
time_per_frame=1.0,
shutter=shutter,
shutter_open="open",
shutter_close="close",
shutter_wait_open=1.0,
shutter_wait_close=5.0,
take_dark=True,
md={"sample": "A rod"}
)
The pseudo-code of it is described as below.
for y in 0, 10, 20:
for x in 0, 10, 20:
for phi in -1, 0, 1:
move to (phi, x, y)
if y moves in this step:
close shutter
wait 5 s
take dark during the movement
open shutter
collect 1 image
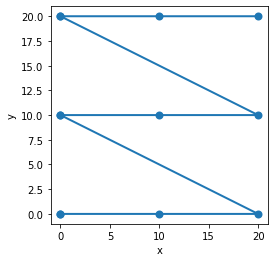
The trajectory in (x, y) plane is shown below. At each (x, y) point, there is a scan at three points along phi axis.
bss.plot_raster_path(plan, "x", "y")
plt.show()